C’est vous qui en parlez le mieux ★★★★★ 5/5 (voir les avis)
Sommaire – temps de lecture environ 20mn
- ⚙️ Définition : qu’est-ce qu’un engrenage en CAO ?
- Guide de Calcul d'Engrenage : Formules Essentielles pour la CAO
- Pourquoi l'engrenage droit montre ses limites ?
- Utiliser le script natif « Spur Gear » de Fusion 360
- Paramètres techniques : Module, Angle de pression et Backlash
- Standard : Metric (ISO) / English (Impérial)
- Pressure Angle (angle de pression)
- Module (m)
- Number of Teeth (Nombre de dents)
- Backlash (jeu fonctionnel)
- Root Fillet Radius (rayon de congé à la base)
- Gear Thickness (épaisseur)
- Hole Diameter (diamètre de l’alésage)
- Pitch Diameter (diamètre primitif)
- 🎯 Résumé technique
- ❌ Les limites du pignon droit
- Pignon Hélicoïdal : Pourquoi l'utiliser pour vos projets Fusion 360 ?
- Atelier Pratique : Modélisation et Assemblage avec Fusion
- Calcul de l'Entraxe Parfait pour engrenages hélicoïdaux
- Conception Hybride : Organiser vos composants dans Fusion 360
- Créer une Liaison Réelle (As-Built Joint) de type Révolution
- Créer le lien de mouvement (Configuration Motion Link)
- Appliquer le bon ratio avec Z = nombre de dents
- 👀 Le test visuel (très important)
- Astuce clé :
- Check-list de validation : Tester l'engrènement visuel
- Le problème invisible : La poussée axiale
- Masterclass : Conçois ton Réducteur Épicycloïdal à Chevrons
- FAQ : Concevoir des Engrenages sous Fusion 360
- Pourquoi mes engrenages imprimés en 3D se bloquent-ils alors qu’ils tournent parfaitement sur Fusion 360 ?
- Est-il possible de modifier le nombre de dents après avoir généré l’engrenage ?
- Quel matériau privilégier pour des engrenages fonctionnels en impression 3D ?
- Comment calculer le ratio de réduction si j'empile plusieurs engrenages ?
- Pourquoi mon moteur "saute" des pas avec mes pignons hélicoïdaux ?
- Comment calculer le module d'un engrenage si je ne connais que son diamètre extérieur ?
- Quel est l'impact de l'angle de pression (14.5° vs 20°) lors du calcul d'un engrenage en CAO ?
- Laisser un Avis sur votre expérience avec C3DF
- Rejoignez-Nous Aujourd'hui
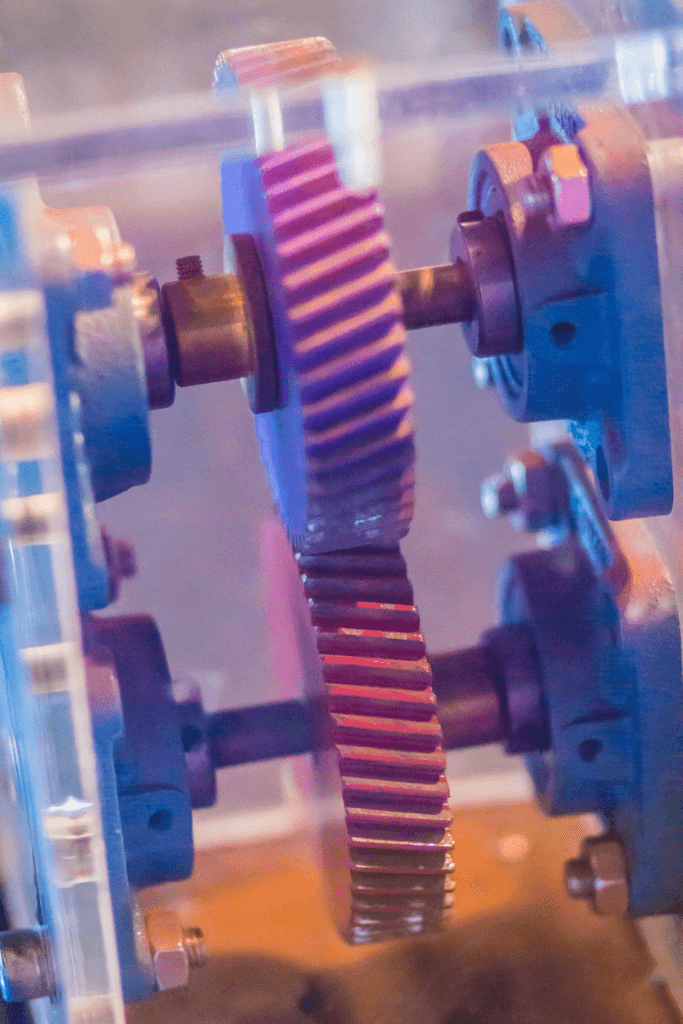
⚙️ Définition : qu’est-ce qu’un engrenage en CAO ?

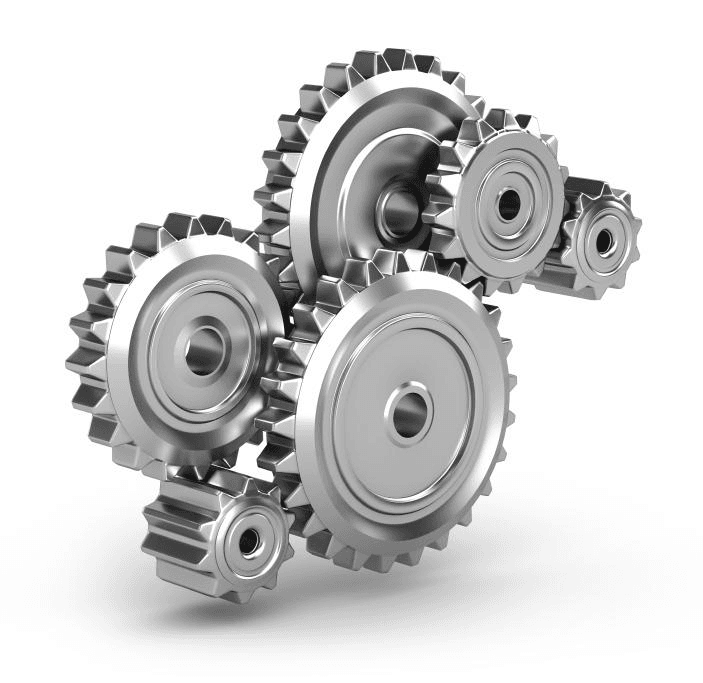
Un engrenage est un mécanisme composé de roues dentées qui s’emboîtent les unes dans les autres pour transmettre un mouvement et une force. Par définition, la plus petite des roues dentées (souvent l’entrainement) est appelé Pignon.
👉 Concrètement :
quand une roue tourne, elle entraîne l’autre grâce au contact des dents.
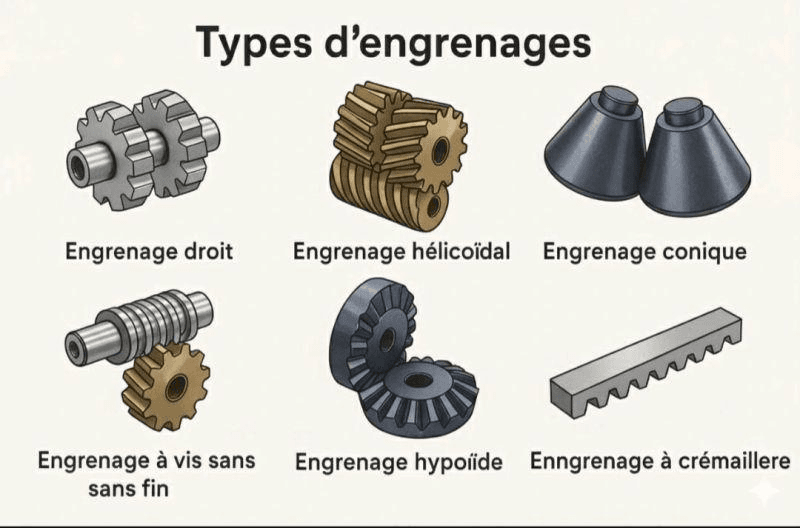
Les 4 fonctions mécaniques d’un train d’engrenage
- Transmettre un mouvement (rotation → rotation)
- Modifier la vitesse (accélérer ou ralentir)
- Augmenter ou réduire le couple (force)
- Changer le sens de rotation
Fonctionnement
- Un engrenage : une petite roue qui entraîne une grande roue
👉 la vitesse de la grande roue diminue
👉 la force de la grande roue augmente
Synthèse : Les bases de la transmission par engrenage
👉 Un engrenage est un système simple mais essentiel en mécanique, utilisé partout :
- moteurs, boite de vitesses, horlogerie
- imprimantes 3D
- robots
- machines industrielles
Guide de Calcul d’Engrenage : Formules Essentielles pour la CAO
Avant de vous lancer dans la modélisation 3D sur un logiciel comme Autodesk Fusion, la maîtrise des calculs mécaniques est indispensable. Un engrenage CAO fonctionnel ne s’improvise pas : il repose sur des lois géométriques strictes. Que vous deviez dimensionner une transmission simple ou un réducteur complexe, vous devez impérativement valider trois éléments clés :
la taille des dentures, l’espace entre vos axes et le rapport de transmission final.
Découvrez ci-dessous les formules mathématiques indispensables pour réussir vos conceptions à tous les coups.
Guide du Calcul d’Engrenage Droit et Dimensionnement du Module
Le calcul d’un engrenage droit est la première étape obligatoire pour définir la géométrie de vos roues dentées. La valeur centrale de ce calcul est le Module (m), exprimé en millimètres. C’est lui qui détermine la taille de la denture et garantit la compatibilité entre deux roues : deux engrenages doivent obligatoirement posséder le même module pour s’engrener correctement.
- La Formule Maîtresse (Calcul du Module) : m = Dp / Z
- Calcul du Diamètre Primitif (Dp) : Dp = m x Z
- Calcul du Diamètre Extérieur (De) : De = Dp + (2 x m)
- Où Dp est le diamètre primitif (en mm) et Z est le nombre de dents.
Astuce CAO : Si vous concevez une pièce pour l’impression 3D, un module minimal de 1,5 ou 2 est fortement recommandé pour conserver des dents suffisamment robustes et faciles à imprimer.
Calcul de l’Entraxe d’un Engrenage Hélicoïdal en CAO
Le calcul de l’entraxe d’un engrenage hélicoïdal est plus subtil que celui d’un engrenage droit. En raison de l’inclinaison des dentures (l’angle d’hélice beta β), les diamètres primitifs s’élargissent. L’entraxe exact (E) correspond à la distance mathématique parfaite séparant les centres de vos deux axes de rotation. Un calcul d’entraxe erroné de seulement 0,1mm provoquera soit un blocage mécanique, soit un jeu fonctionnel destructeur.
- Formule du Diamètre Primitif Hélicoïdal (Dp) : Dp = (m x Z) / cos(β)
- Formule Générale de l’Entraxe (E) : E = (Dp1 + Dp2) / 2
- Formule Directe combinée pour denture hélicoïdale : E = m x (Z1 + Z2) / 2 x cos(β)
- Où Z1 et Z2 représentent le nombre de dents du pignon et de la roue, et β l’angle d’hélice (ex: 20°).
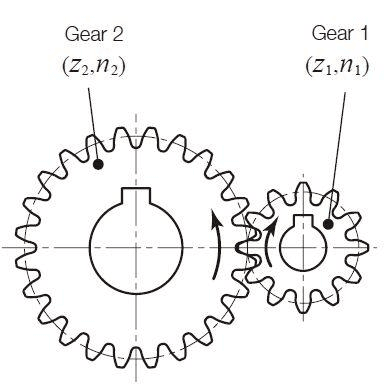
Formule du Rapport de Réduction d’un Engrenage : Maîtriser le Couple et la Vitesse
La formule du rapport de réduction d’un engrenage (ou ratio de transmission, noté R) permet de quantifier précisément l’impact de votre train d’engrenages sur la vitesse de rotation et le couple mécanique. Ce ratio dépend uniquement du nombre de dents de vos composants et reste totalement indépendant du module ou de l’angle d’hélice choisi.
- Formule du Ratio de Transmission (R) : R = Z.menant / Z.mené = N.sortie / N.entrée
- Calcul de la Vitesse de Sortie (N.sortie) : N.sortie = N.entrée x R
- Multiplication du Couple (C) : Le couple en sortie est inversement proportionnel à la vitesse. Si votre vitesse est divisée par 3, votre couple théorique est multiplié par 3 (C.sortie = C.entrée / R)
- Où Z.menant est le nombre de dents du pignon moteur et Z.mené celui de la roue entraînée.
Pourquoi l’engrenage droit montre ses limites ?
Le pignon droit (Spur Gear de Fusion 360) est le point de départ universel en mécanique CAO. De plus, il est intégré en natif dans les dernières versions d’Autodesk Fusion.
C’est souvent le premier engrenage que l’on modélise sur Fusion 360, car :
- il est simple à comprendre
- rapide à générer
- parfaitement adapté aux bases de la transmission mécanique
Mais dès que tu passes à des projets plus avancés (robotique, CNC, mécanismes rapides), ses limites apparaissent très vite.
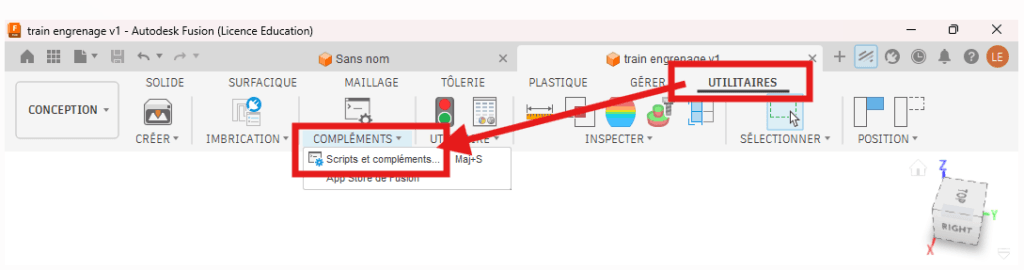
Utiliser le script natif « Spur Gear » de Fusion 360
Dans Fusion 360, Autodesk propose un script intégré pour générer automatiquement un engrenage droit.
👉 Chemin :
UTILITAIRES → COMPLÉMENTS → Scripts et compléments
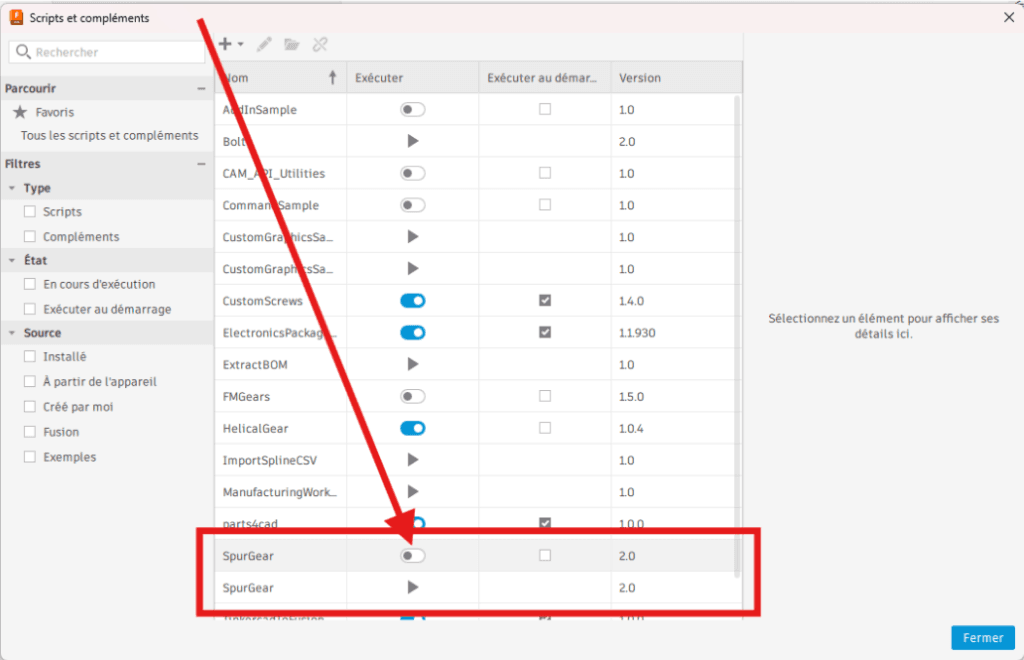
Vérifier tout d’abord que le script soit bien ‘activé’ dans les ‘Scripts et Compléments’.
Ce script te permet de générer un pignon paramétrique en quelques secondes.
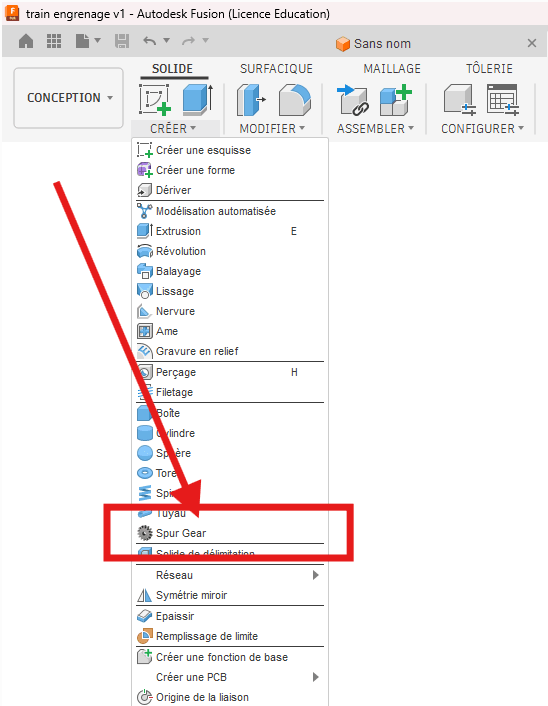
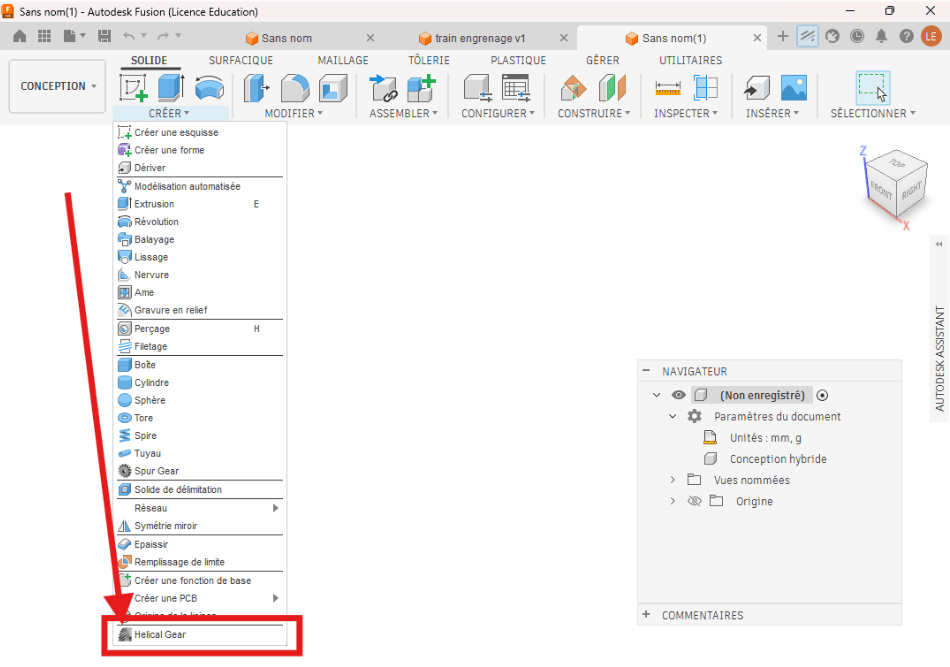
Une fois le Script activé, il apparait dans le menu CRÉER de l’onglet SOLIDE (bandeau supérieur de l’interface de Fusion 360).
On fait OK pour valider et on retrouve en bas du menu CRÉER (dans l’onglet SOLIDE) le fameux raccourcis du Plugin (Script) Spur Gear
Paramètres techniques : Module, Angle de pression et Backlash
👉 Comprendre ces paramètres de [Spur Gear] est la base pour créer des engrenages fonctionnels et compatibles entre eux.
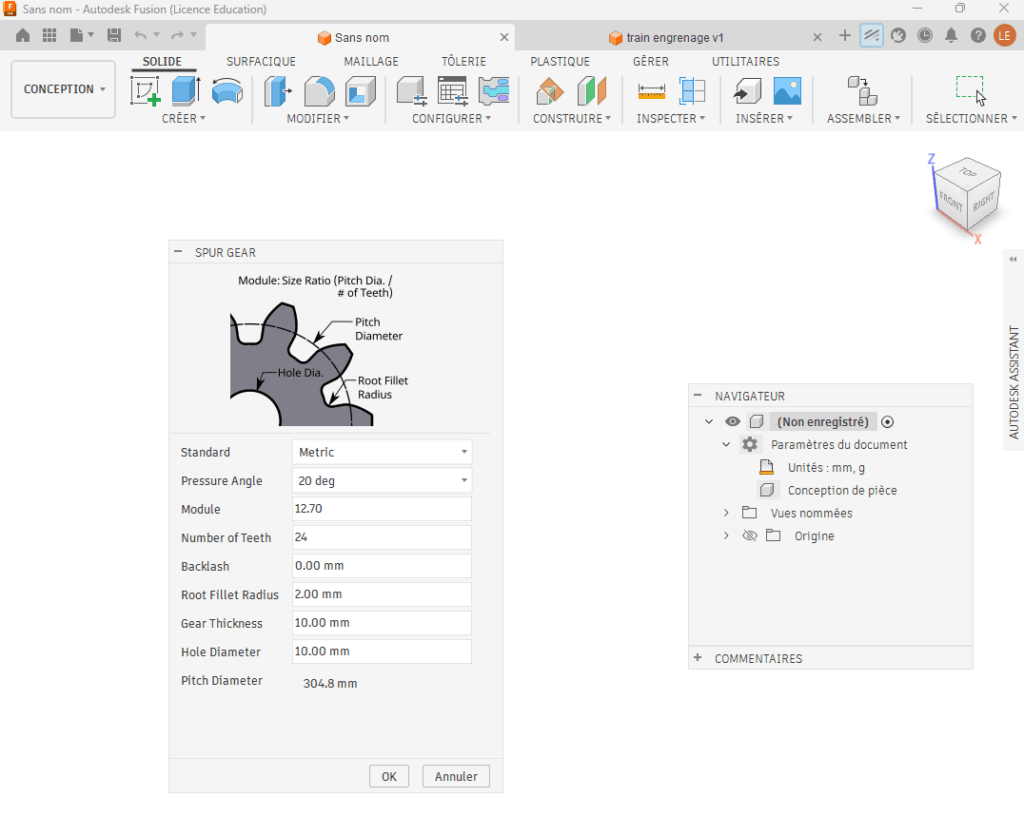
Avant de modéliser un engrenage droit dans Fusion 360, il faut connaître les paramètres de base. Les voici dans les grandes lignes, sans prise de tête 👇
Standard : Metric (ISO) / English (Impérial)
- Metric (ISO)
- Utilise le module (m)
- Standard européen
- ✔️ recommandé pour débuter
- English (Impérial)
- Utilise le Diametral Pitch (DP)
- Standard américain
👉 ⚠️ Ne mélange jamais les deux : incompatibles entre eux.
Pressure Angle (angle de pression)
- 14.5° → ancien standard, plus doux mais fragile
- 20° → ✔️ standard actuel (recommandé)
- 25° → plus robuste, mais plus de contraintes
- Custom → cas spécifiques (avancé)
👉 Détermine la façon dont les dents se touchent (dans un train d’engrenage les roues dentées auront le même angle).
Module (m)
- Définit la taille des dents
- Plus le module est grand → plus les dents sont grosses
👉 Toutes les roues dentées d’un système d’engrenage (train d’engrenage) doivent avoir le même module.
Number of Teeth (Nombre de dents)
- Noté Z
- Détermine :
- le diamètre
- le rapport de transmission
👉 Exemple : 20 dents vs 40 dents → réduction de vitesse x2
Backlash (jeu fonctionnel)
- Petit espace entre les dents
- Évite :
- le blocage
- les frottements excessifs
👉 Indispensable en impression 3D (tolérances !)
Root Fillet Radius (rayon de congé à la base)
- Arrondi à la base des dents
- Permet de :
- réduire les contraintes
- éviter la casse
👉 Plus il est grand → plus la dent est solide
Gear Thickness (épaisseur)
- Largeur de l’engrenage
- Impacte :
- la rigidité
- la surface de contact
Hole Diameter (diamètre de l’alésage)
- Trou central pour l’axe moteur
- À adapter selon :
- axe lisse
- axe D
- axe moteur (ex : NEMA)
Pitch Diameter (diamètre primitif)
👉 Le plus important à comprendre
- Diamètre théorique où les dents s’engrènent
- Sert à :
- calculer l’entraxe
- positionner les engrenages
💡 Ce n’est PAS le diamètre extérieur !
👉 C’est la zone invisible où la transmission se fait réellement.
🎯 Résumé technique
- Metric (ISO) + 20° = choix par défaut
- Même module + même angle = obligatoire
- Le diamètre primitif = base de tous les calculs
- Le backlash = essentiel en impression 3D
❌ Les limites du pignon droit
Même s’il est simple, le pignon droit présente plusieurs défauts :
- Bruit élevé à haute vitesse
- Vibrations importantes
- Usure rapide des dents
- Contact brutal (une dent à la fois)
👉 Résultat : il devient rapidement inadapté pour des projets exigeants ou durables.
Pignon Hélicoïdal : Pourquoi l’utiliser pour vos projets Fusion 360 ?
Après le pignon droit, l’étape logique consiste à passer au pignon hélicoïdal.
👉 La différence est simple :
les dents ne sont plus droites… elles sont inclinées.
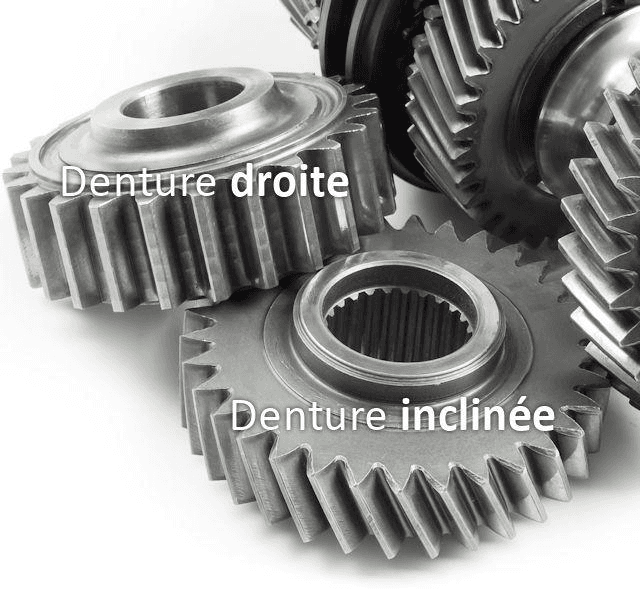
Pourquoi c’est important ?
Cette inclinaison permet :
- un contact progressif entre les dents
- une surface de contact plus grande
- un fonctionnement :
- ✔️ plus fluide
- ✔️ plus silencieux
- ✔️ plus durable
👉 C’est le type d’engrenage utilisé dès qu’on cherche de la performance.
Installation et activation du Plugin « Helical Gear »
Dans Fusion 360, il n’existe pas d’outil natif aussi complet que pour les pignons droits.
👉 Il faut donc passer par un plugin dédié, beaucoup plus puissant.
✔️ Étapes :
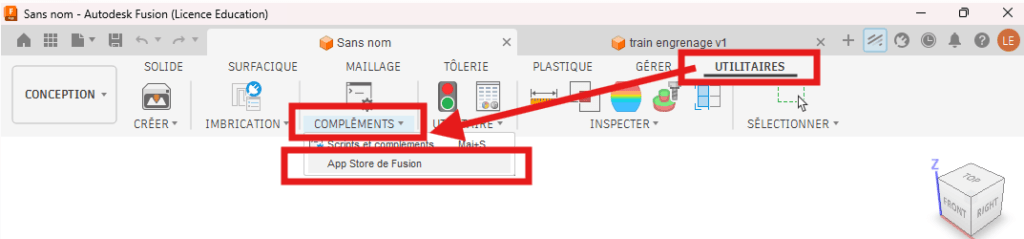
- Télécharger le plugin depuis l’App Store Autodesk
👉 UTILITAIRES → COMPLÉMENTS → App Store de Fusion - L’installer sur ton poste
- L’activer dans :
👉 UTILITAIRES → COMPLÉMENTS → Scripts et compléments
👉 Une fois sur l’App Store de Fusion, tu recherches ‘helical gear’ -> tu cliques sur la loupe (rechercher)
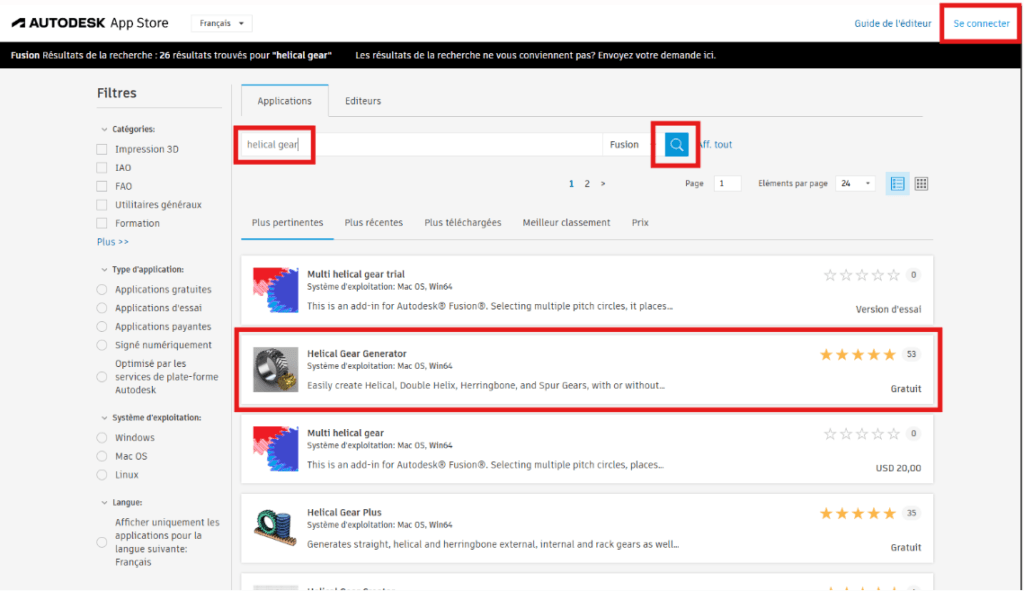
👉 vérifie d’être connecté à ton [Compte/Profil Autodesk] et sélectionne le Complément « Helical Gear Generator »
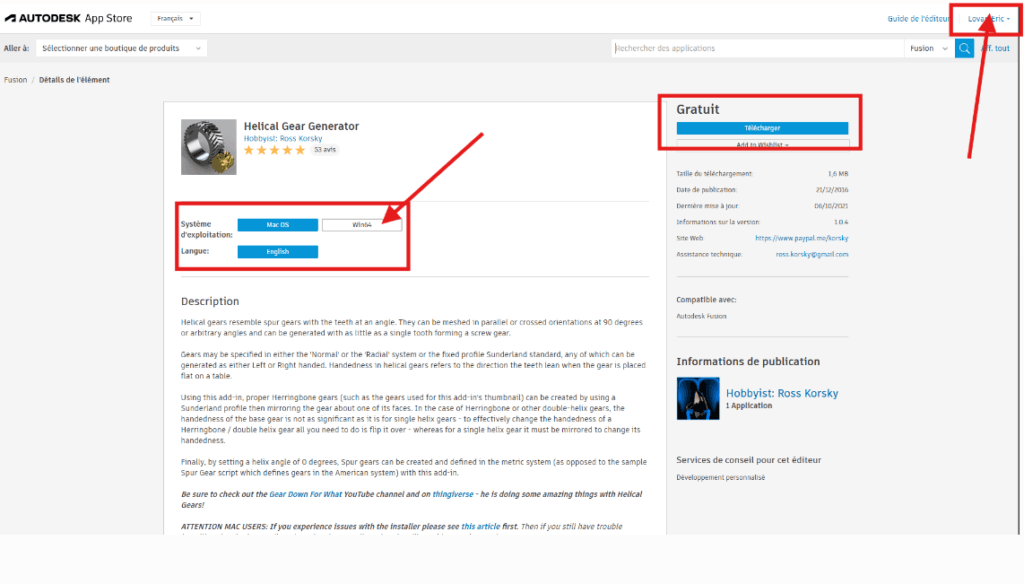
👉 Choisis ton système d’exploitation Mac ou PC et Télécharge le fichier installation « .msi » -> Exécute ensuite l’installation
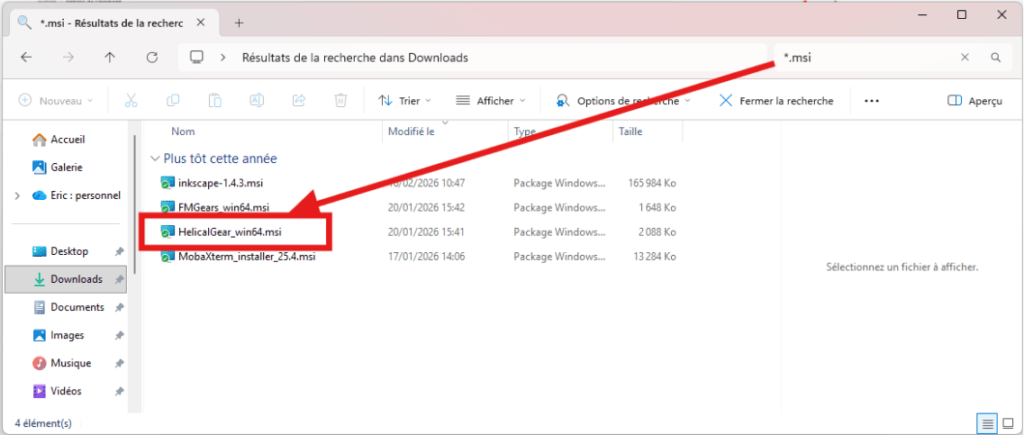
👉 Retrouve le fichier téléchargé « .msi » -> exécute ensuite l’installation
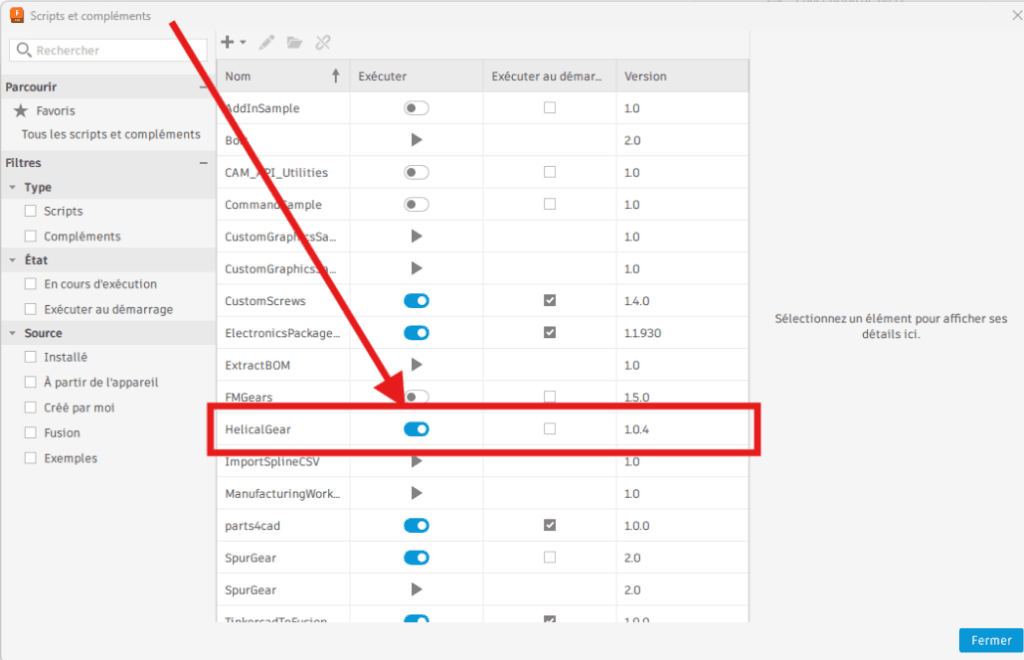
👉 Lance ta nouvelle application fraichement installée dans Scripts et Compléments
Rappel : menu UTILITAIRES -> COMPLÉMENTS -> Scripts et compléments -> active le bouton Exécuter
👉 Une fois activé, tu accèdes à :
- plus de paramètres
- plus de contrôle
- des engrenages directement exploitables en impression 3D
Choisir l’Angle d’Hélice : Performance vs Contraintes axiales

👉 L’angle d’hélice correspond à l’inclinaison des dents.
Plus cet angle est élevé :
- plus les dents glissent progressivement les unes sur les autres
- plus le contact est doux et continu
Comment choisir son angle ?
- 20°
👉 bon compromis (standard)
👉 idéal pour débuter - 30°
👉 plus silencieux
👉 plus fluide - 45°
👉 très fluide
👉 mais plus exigeant (contraintes + impression 3D)
⚠️ Synthèse : Avantages de la denture hélicoïdale
- L’angle d’hélice améliore fortement les performances
- Mais il introduit aussi des contraintes mécaniques (force latérale 👀)
- Il faut donc le choisir en fonction de ton projet
👉 Dans la suite, tu vas voir comment assembler et faire fonctionner correctement ces engrenages dans Fusion 360 🔧
Atelier Pratique : Modélisation et Assemblage avec Fusion
👉 On passe à la pratique.
Dans cet exemple, tu vas créer un engrènement simple avec :
- une roue de 16 dents
- un pignon de 12 dents
👉 Objectif : obtenir un mouvement fluide et réaliste dans Fusion 360
Calcul de l’Entraxe Parfait pour engrenages hélicoïdaux
👉 Cette formule te permet de positionner correctement tes deux engrenages.
- D1 = diamètre primitif de la roue (16 dents)
- D2 = diamètre primitif du pignon (12 dents)
Conception Hybride : Organiser vos composants dans Fusion 360
- depuis début 2026 la notion d’assemblage à changé dans Autodesk Fusion
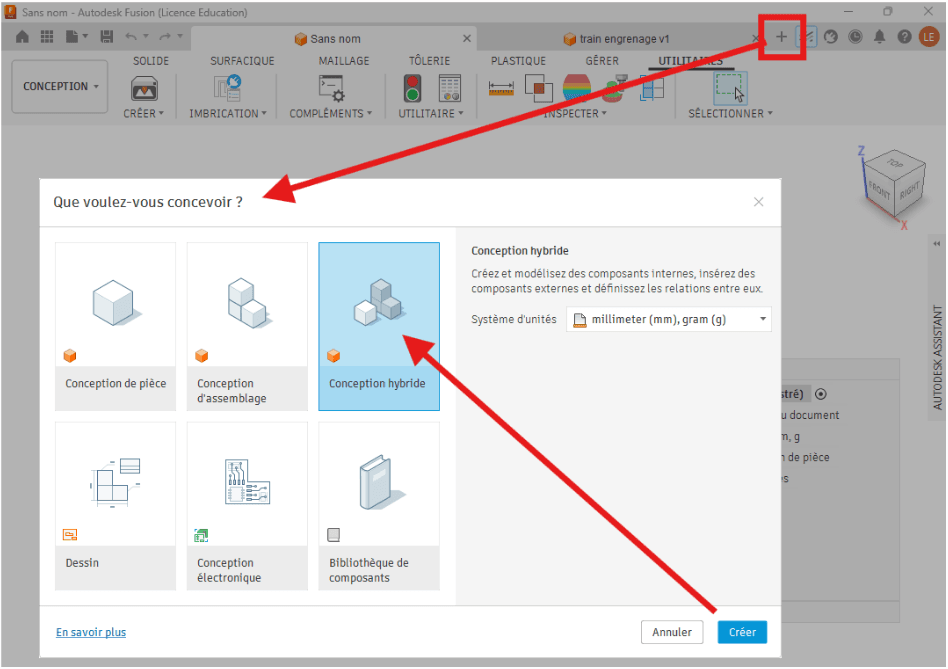
- nous créerons d’abord une Nouvelle conception +
- puis choisir conception hybride afin d’insérer des Composants et définir des relations entre eux
- place chaque engrenage comme un composant séparé
- positionne-les avec la bonne distance entre axes
- ajuste jusqu’à ce que :
- les dents se touchent (en un point de contact précis)
- sans blocage
- sans jeu excessif (attention pour l’impression 3D selon l’imprimante 3D il faudra laisser du jeu fonctionnel)
👉 C’est l’étape la plus importante pour un engrènement propre.
👉 Paramétrage de la fenêtre du Plugin Helical Gear Generator.
Nous utiliserons les paramètres ci-dessous (Attention pense à inverser R : droite / L : gauche)
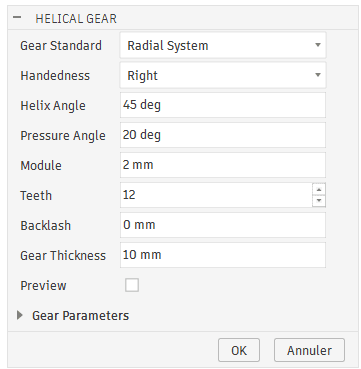
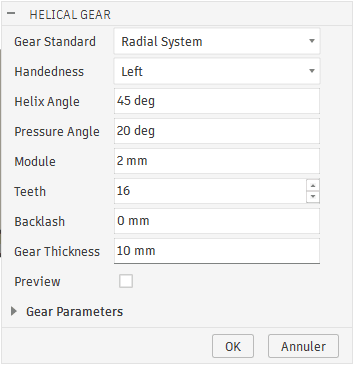
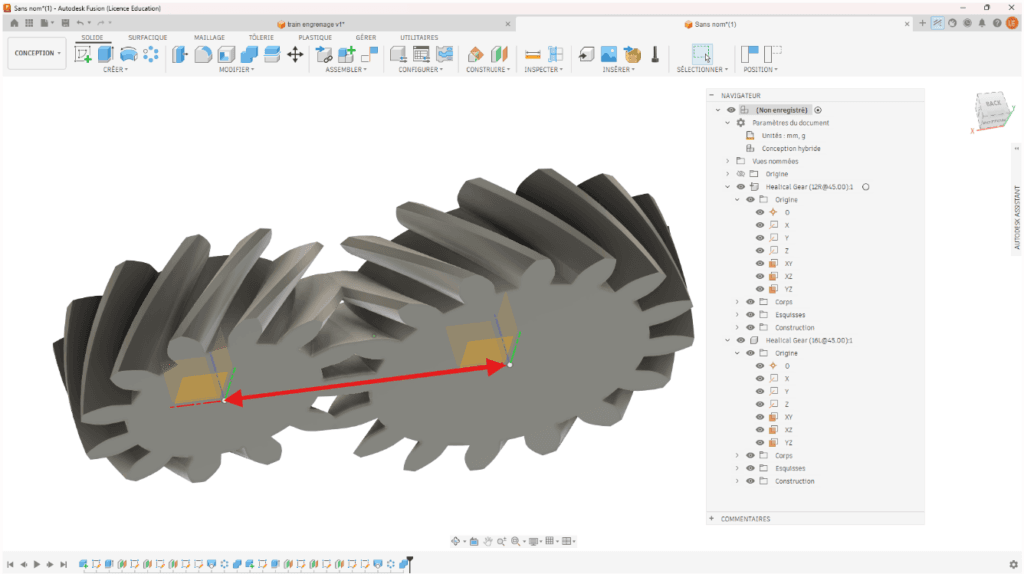
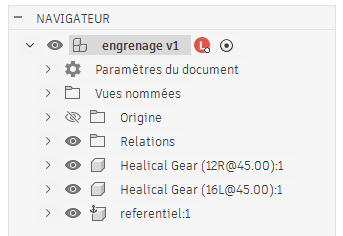
Les 2 roues dentées 12R et 16L pour 12 et 16 dents sont modélisées l’une sur l’autre, elles ont le même repère x,y,z 0,0,0
Si tu regardes les paramètres dans > Gear Parameters tu verras les valeurs des 2 Diamètres Primitifs :
La règle de calcul du Dp est fonction du module m (ou plutôt le module m est fonction de Dp/Zn) : m = Dp / Zn
m = Module (ici 2mm)
Zn = Nombre de dents (ici 12 et 16)
Dp = Diamètre Primitif (ici 24mm et 32mm)
Rappel l’entraxe parfait des 2 roues dentées sera ( Dp1 + Dp2 ) / 2
soit ( 24 + 32 ) / 2 = 28 mm
Utilise la commande Déplacer ✛ de Fusion pour déplacer la roue 16 dents de 28mm sur l’axe des X
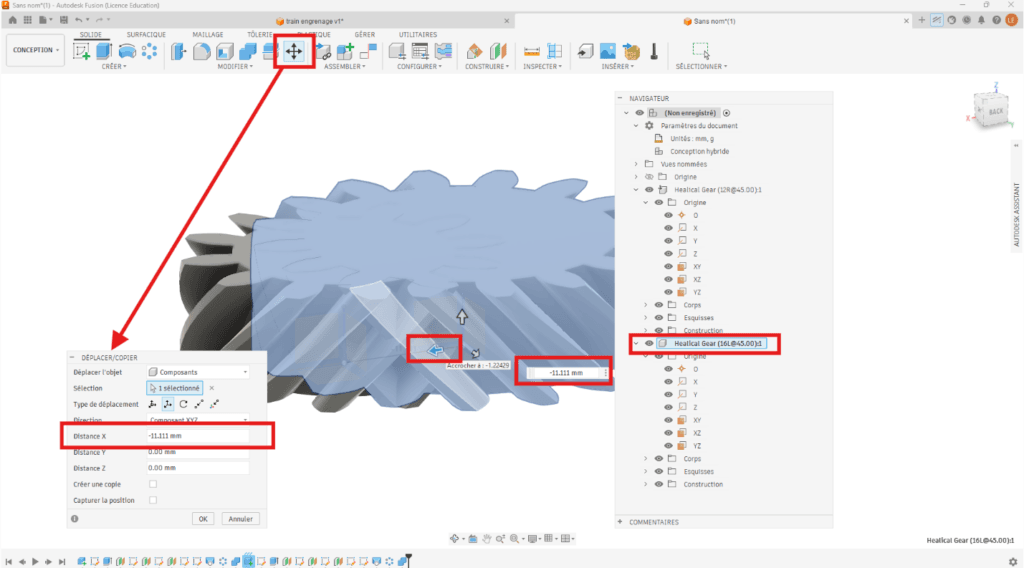
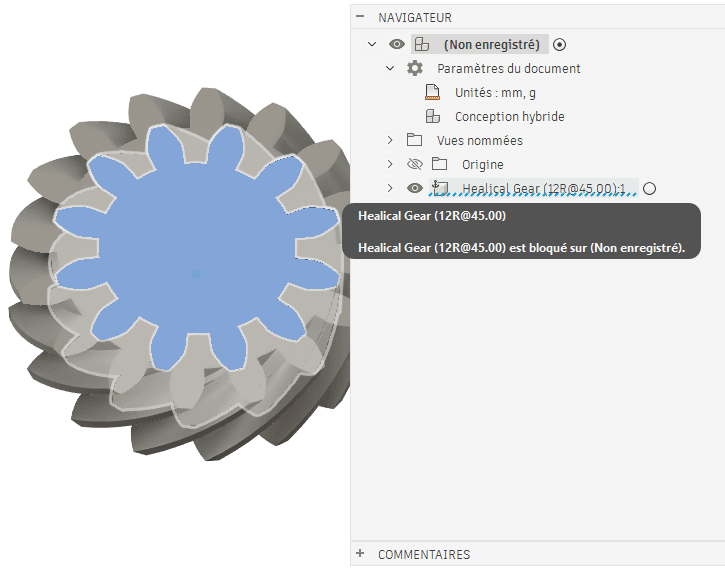
La roue 12 dents est « bloquée » ⚓ sur le parent (du fait de son insertion en premier composant)
-> Attention la roue 16 dents peut bougée ! Ne Pas la déplacer en cliquant dessus !
Pour Assembler et Animer dans l’espace 3D les 2 roues entre elles, nous allons créer un Référentiel (un Composant vide Fixe)
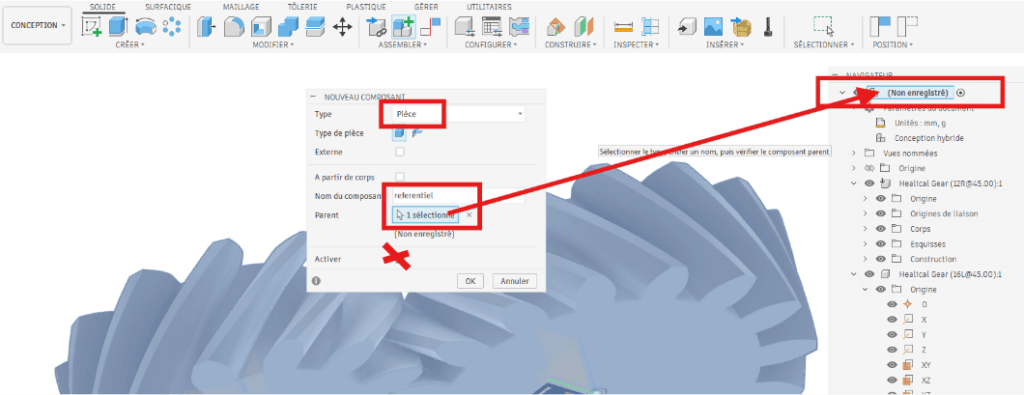
Utilise le menu ASSEMBLER pour créer un Nouveau composant
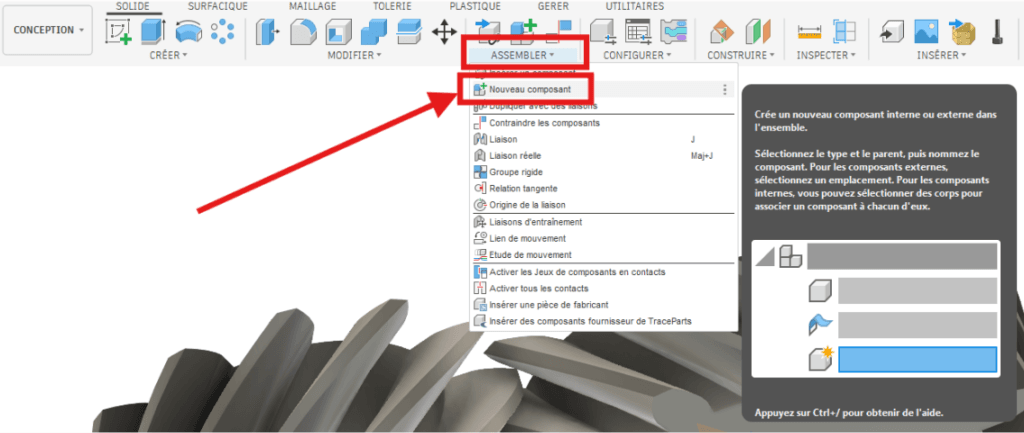
Pense à décocher Activer (on laisse le ‘Composant’ parent (Non enregistré) activer ʘ
ʘ = symbole de composant activer (à droite du composant)
PS : le composant qui est activé est le composant sur lequel on travaille
Créer une Liaison Réelle (As-Built Joint) de type Révolution
Utilise le menu ASSEMBLER pour créer une Liaison Réelle
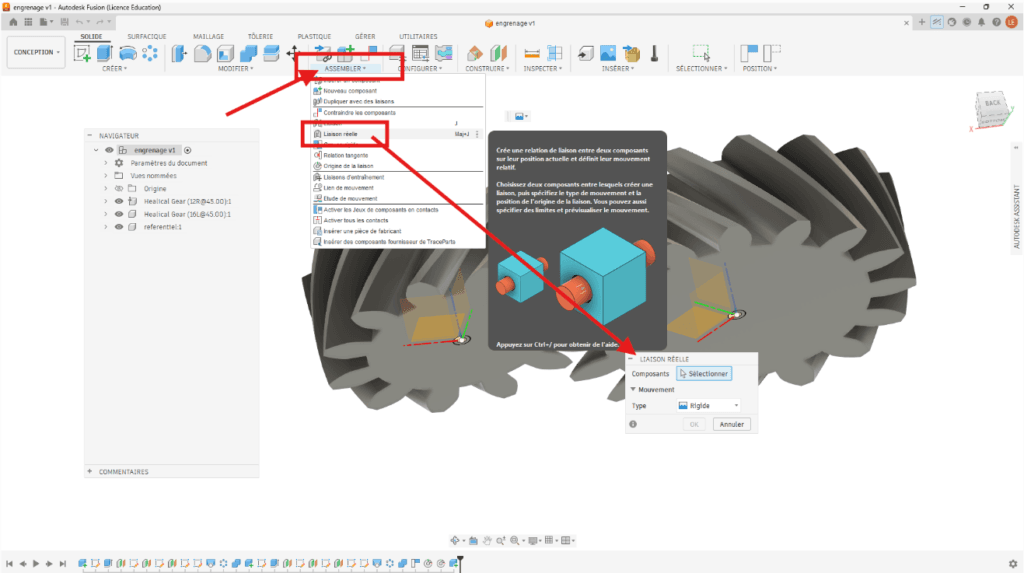
Dans liaison réelle -> choisir Mouvement -> Type -> Révolution
Attention : le choix des Composants est important !
LIAISON RÉELLE 1 :
Composants -> La Roue Dentée 12R (la petite) avec Le Référentiel (on fait tourner la roue 1 sur elle-même)
Accrochage -> le centre de la Roue Dentée 12R
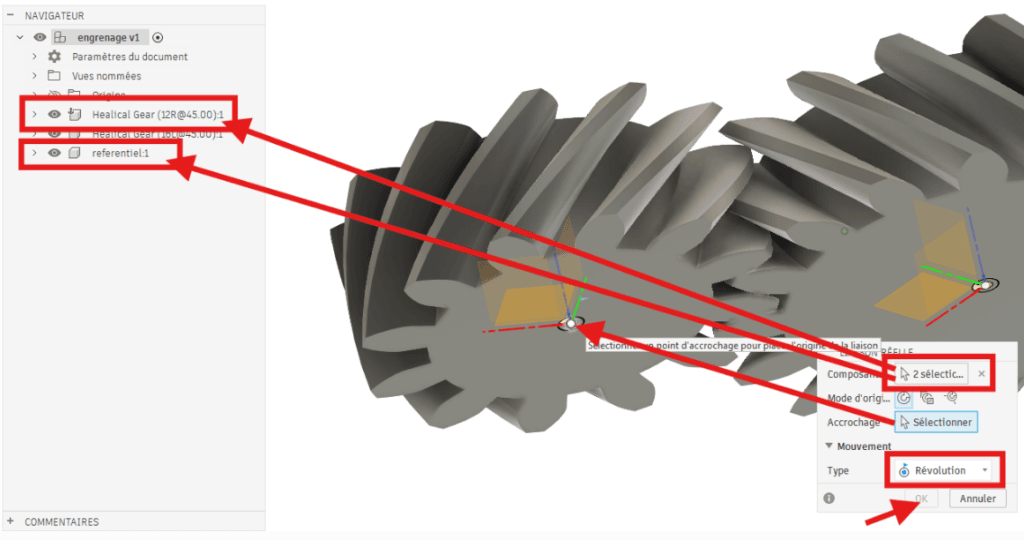
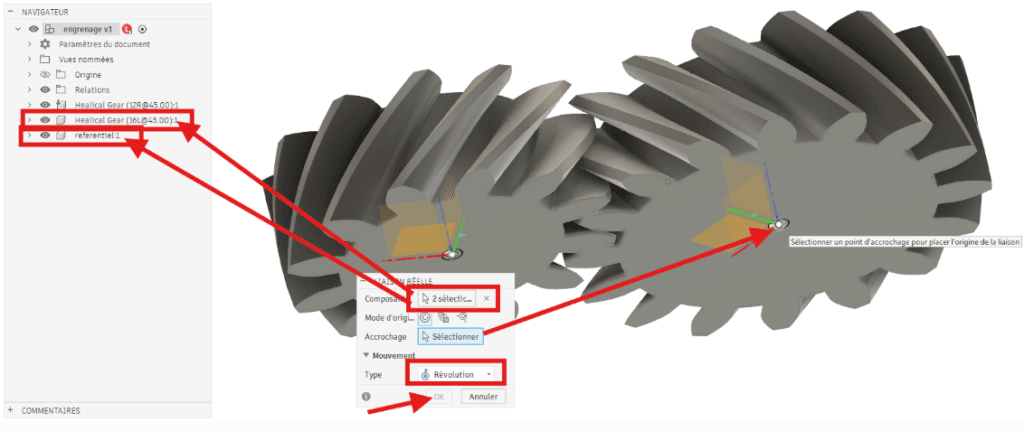
LIAISON RÉELLE 2 :
Composants -> La Roue Dentée 16L (la grande) avec Le Référentiel (on fait tourner la roue 2 sur elle-même)
Accrochage -> le centre de la Roue Dentée 16L
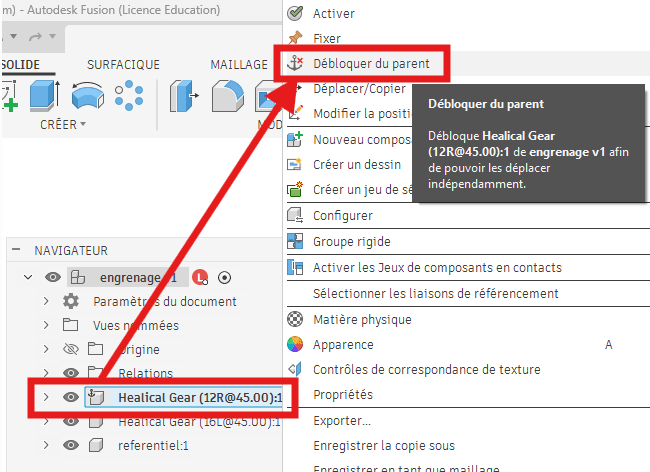
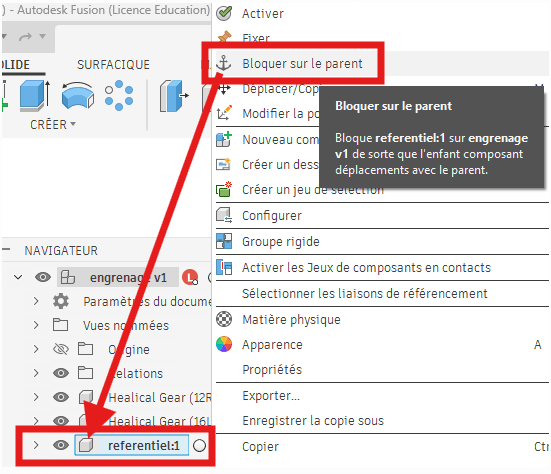
Bloquer le référentiel dans l’espace 3D et débloquer (libérer) les Roues dentées (elles doivent tourner sur elles-mêmes)
⚓ Débloqué la Roue Dentée 12R -> clic droit sur le Composant [Healical Gear 12R] -> Débloquer du parent ⚓
Clic droit sur le Composant [Referentiel] -> Bloquer sur le parent ⚓
Un Composant bloqué à le symbole ⚓
Vérifier la rotation libre des 2 Roues dentées -> elles doivent maintenant tourner librement !
-> clic et maintiens le clic sur une roue et fais la tourner, fais pareil pour l’autre
Zoomer fortement et Aligner les 2 roues dentées -> positionner les dents en correspondance « creux / dents »
Créer le lien de mouvement (Configuration Motion Link)
Une fois les engrenages bien positionnés
Étapes :
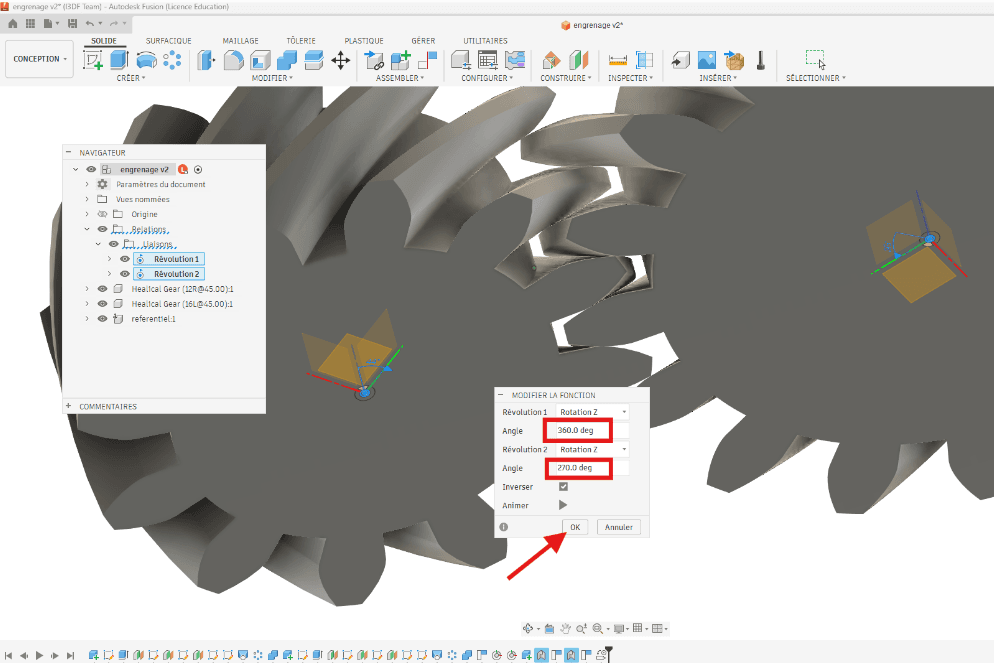
- Utilise les Relations -> Liaisons -> Révolution 1 & Révolution 2
- Va dans ASSEMBLER -> Lien de mouvement
- Sélectionne les 2 liaisons « Pivots » (Navigateur ou Dessin vue 3D)
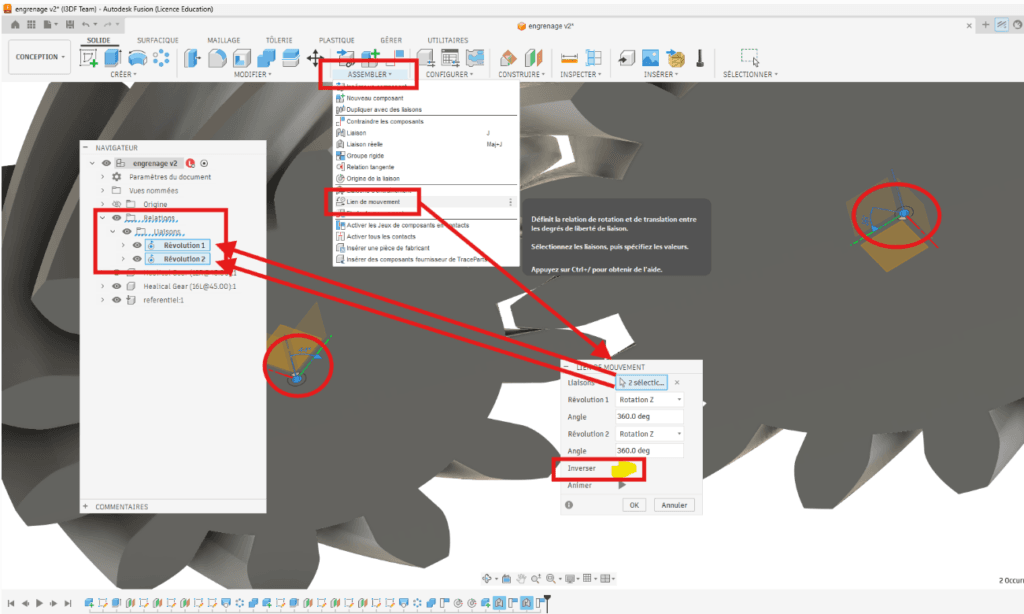
Observe l’animation visuelle ▶ / ⏹ des 2 roues dentées, et Inverse (ou pas) le sens de rotation !
Appliquer le bon ratio avec Z = nombre de dents
👉 Dans notre cas :
- Z1 = 12 dents
- Z2 = 16 dents
👉 Ratio = 12 / 16
➡️ Cela signifie que :
- le petit pignon tourne plus vite
- la grande roue tourne plus lentement
- pour 1 tour (360°) de la roue 12 -> la roue 16 effectuera (12/16 x 360°) tours (soit 0.75 tour, 3/4 de tour ou encore 270°)
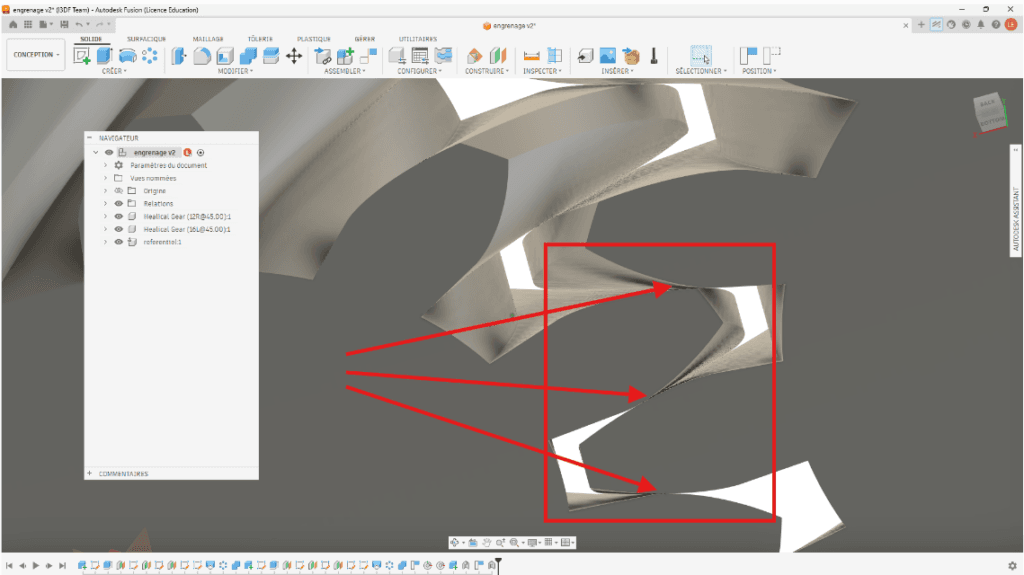
👀 Le test visuel (très important)
👉 Lance la rotation :
- observe si les dents s’emboîtent correctement
- si ça s’entrechoc → problème de sens de rotation
- si ça se dérègle en tournant → problème d’angle
- si ça bouge ou ça ne tourne pas → reprends ce tutoriel
Astuce clé :
👉 Inverse le sens de rotation si nécessaire
Pourquoi ?
Parce que les engrenages hélicoïdaux doivent :
➡️ avoir des hélices opposées pour fonctionner correctement (roue droite et roue gauche)
Check-list de validation : Tester l’engrènement visuel
- L’entraxe = base de tout
- Le ratio dépend uniquement du nombre de dents
- Le test visuel = validation finale
👉 Dans la suite, tu vas découvrir un problème que 90% des débutants ignorent…
et qui peut ruiner ton mécanisme 👀
Le problème invisible : La poussée axiale
- Tu as réussi à faire tourner tes pignons hélicoïdaux dans Fusion 360. C’est fluide, c’est beau, et l’animation fonctionne à merveille. Mais attention : en conditions réelles, surtout sur un mécanisme sollicité (comme un bras robotique), il y a un piège que beaucoup ignorent.
- L’explication technique : L’inclinaison de la denture crée une force latérale (axiale). Ton pignon ne veut pas seulement tourner, il veut littéralement « sortir » de son axe. Cela fatigue tes roulements et finit par désaligner ton moteur.


Masterclass : Conçois ton Réducteur Épicycloïdal à Chevrons
Tu veux supprimer cette poussée axiale tout en multipliant ton couple par 3 ? La solution ultime, c’est le Double Hélicoïdal (ou Chevron) intégré dans un Réducteur Épicycloïdal. C’est le sommet de la mécanique en impression 3D.
Ce que tu vas apprendre dans la version Premium (Cours Vidéo + PDF + .f3d + 3MF)
- La Symphonie des Chevrons : La technique pour annuler la poussée axiale.
- La Couronne Externe : Comment transformer un pignon en logement structurel.
- Le Ratio Ultime : La formule mathématique pour une synchronisation parfaite, sans aucun décalage de dent.
- Optimisation 3D : Mes réglages secrets d’échelles de jeu fonctionnels, de matériaux et de paramètres pour un résultat pro dès la première impression 3D.
🚀 Offre de lancement « Early Bird »
Parce que tu suis mes tutos et que tu fais partie des passionnés qui lisent jusqu’au bout, je te propose un coup de pouce pour franchir le pas.
- Tarif Standard :
29;90 € - Offre Spéciale (99 premiers inscrits) : 14,70 €
Ne rate pas la sortie de la MasterClass Fusion 360 « Engrenages à Chevrons et Réducteurs Épicycloïdaux« , pense à t’inscrire !
** Autorisation RGPD : J’autorise C3DF.fr à conserver mes données transmises via ce formulaire. Aucune exploitation commerciale ne sera effectuée avec mes données personnelles, celles-ci sont conservées uniquement pour me transmettre des fichiers Fusion 360 PDF, des conseils, des informations sur les nouveautés, les cours, tutos et formations. Je peux me désincrire et supprimer mes données personnelles à tout moment. Consulter notre politique de confidentialité.
FAQ : Concevoir des Engrenages sous Fusion 360
Pourquoi mes engrenages imprimés en 3D se bloquent-ils alors qu’ils tournent parfaitement sur Fusion 360 ?
C’est le problème classique du jeu fonctionnel (Backlash). Dans Fusion 360, les pièces sont mathématiquement parfaites, mais votre imprimante 3D a une marge d’erreur. Si vous ne paramétrez pas un Backlash (généralement entre 0.1mm et 0.2mm dans le plugin), les dents seront trop serrées et le mécanisme forcera.
Est-il possible de modifier le nombre de dents après avoir généré l’engrenage ?
Avec le script natif ou le plugin Helical Gear, l’engrenage est généré à un instant T. Contrairement à une esquisse classique, vous ne pouvez pas simplement changer un chiffre dans les paramètres pour voir les dents se multiplier. Il faut généralement supprimer le composant et le régénérer. C’est pourquoi il est crucial de valider vos calculs d’entraxe avant la modélisation finale.
Quel matériau privilégier pour des engrenages fonctionnels en impression 3D ?
Le PLA est excellent pour le prototypage et les mécanismes peu chargés grâce à sa rigidité. Cependant, pour des engrenages soumis à une friction constante ou à de la chaleur (moteurs NEMA), le PETG ou idéalement le Nylon sont recommandés. Le Nylon offre un glissement naturel qui réduit l’usure des dents sans nécessiter de lubrifiant complexe.
Comment calculer le ratio de réduction si j’empile plusieurs engrenages ?
Le ratio total d’un train d’engrenages est le produit des ratios de chaque étage. Si vous avez un premier pignon de 12 dents qui entraîne une roue de 36 (ratio 1:3), suivi d’un pignon de 10 qui entraîne une roue de 40 (ratio 1:4), votre réduction totale est de 1:12 (3 x 4). C’est cette logique que nous approfondissons dans notre Masterclass sur le réducteur épicycloïdal.
Pourquoi mon moteur « saute » des pas avec mes pignons hélicoïdaux ?
C’est souvent dû à la poussée axiale. L’angle d’hélice transforme une partie de la force de rotation en force latérale. Si votre pignon n’est pas parfaitement bloqué sur l’axe du moteur, il glisse, crée un désalignement et fait forcer le moteur. Si vous rencontrez ce problème, il est temps de passer au double hélicoïdal (Chevrons), qui annule cette force et stabilise le mécanisme.
Comment calculer le module d’un engrenage si je ne connais que son diamètre extérieur ?
C’est un calcul classique en rétro-ingénierie (reverse engineering) lorsque vous devez reproduire un engrenage cassé. Pour trouver le module (m) à partir du diamètre extérieur (De) et du nombre de dents (Z), vous devez appliquer la formule dérivée suivante :
La formule de calcul :
m = De / (Z + 2)
Exemple concret : Si vous comptez 20 dents sur votre pignon défectueux et que votre pied à coulisse mesure un diamètre extérieur de 44mm, le calcul est : 44 / (20 + 2) = 44 / 22 = 2. Votre engrenage possède donc un module de 2. Vous pouvez maintenant configurer le script Spur Gear de Fusion 360 avec cette valeur exacte.
Quel est l’impact de l’angle de pression (14.5° vs 20°) lors du calcul d’un engrenage en CAO ?
L’angle de pression définit l’inclinaison de la ligne de contact entre deux dents qui s’engrènent. Bien qu’il n’impacte pas le calcul du diamètre primitif, il modifie radicalement la forme et la résistance de la denture dans votre logiciel de CAO :
L’angle de 14.5° (Ancien standard) : Il génère des dents plus fines à la base. Le fonctionnement est très silencieux et fluide, mais les dents sont fragiles et tolèrent très mal les fortes charges. Il est aujourd’hui presque abandonné.
L’angle de 20° (Standard moderne) : Il crée une dent plus large et robuste à sa base (au niveau du rayon de congé). C’est le choix par défaut recommandé pour l’impression 3D car il réduit drastiquement le risque de cisaillement et de casse de la dent sous l’effet du couple moteur.
Excellent !
Je tenais à vous remercier ! j’ai plus appris avec vos cours PDF pour moins de 50€ que dans la formation Fusion 360 que j’ai suivi récemment chez un de vos concurrent à plus de 1500€ !!!! vraiment merci je recommande à 1M%
Réponse de Conception 3D Formation
Merci Rémi pour cet avis ! effectivement nos PDF sont très techniques mais très accessibles !!! nous sommes ravis que nos contenus aient dépassés vos attentes , à très bientôt pour d’autres conceptions
Très bon
Bien lisible, bien expliqué et bien disposé. Donne vraiment le goût de continuer.
Réponse de Conception 3D Formation
Merci Luc pour cet avis positif !
au top
au top
Réponse de Conception 3D Formation
Merci pour cet avis positif, ravis que ces cours vous aient satisfait !!
tres bien expliqué
cela ma m’aider a bien débuter
Réponse de Conception 3D Formation
Merci André pour votre avis positif. Nous sommes ravis que ces PDF vous aient aidé à débuter.
très bon article
Un grand Merci pour tous ces détails et explications claires !
Réponse de Conception 3D Formation
Merci Sandrine pour ce retour très positif !
Très bonne continuation dans votre apprentissage,
Toute l’équipe C3DF
Laisser un Avis sur votre expérience avec C3DF
Consultez les avis C3DF ★★★★★ 5/5 (voir les avis)